簡介:ABB機器人示教器維修,ABB示教盒維修,機器人維修等,可以咨詢廣州子銳機器人技術(shù)有限公司,本公司是一家第三方工業(yè)機器人維修服務(wù)商, 服務(wù)電話:400-878-2528;手機:15889988091。 1.認識ABB虛擬示教器 如圖3.1所示在離線子菜單下有一個虛擬示教器,點擊它……
1.認識ABB虛擬示教器
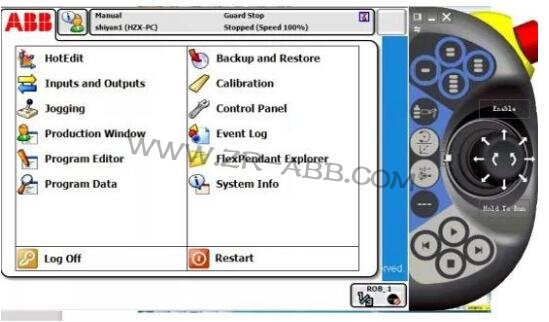
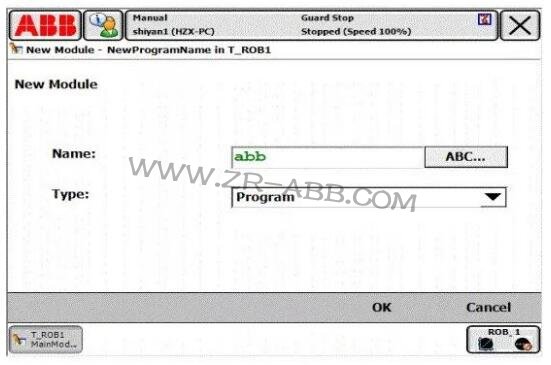
2.在虛擬示教器上建立新程序項目
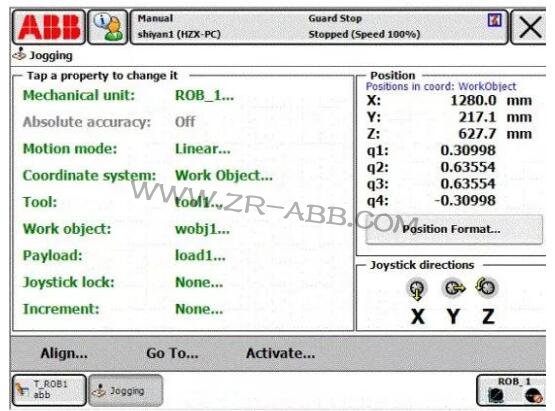
在圖3.3中點擊進入“ Program Editor”界面,如圖3.4所示進入界面后新建一個取名為“abb”的新程序。然后回到虛擬教器主界面,點擊進入“Jogging”界面,在“ Jogging”界面將“ Motion mode”和“ Coordinatesystem”分別選擇為“ Linear”和“ Work Object”類型,并新建“Tool” “ Work object”、“ Pay load”三個項目。如圖3.5a、圖3.5c、圖3.5d所示。其中 Tool1的“ Initial Value”類型中“x.y.z”數(shù)值都改為80,“mass”的數(shù)值改為1,如圖3.5b所示
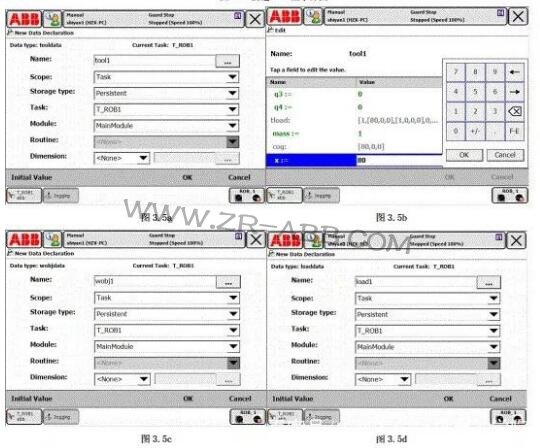
建立好的 Jogging界面如圖3.6所示
3.程序的編寫
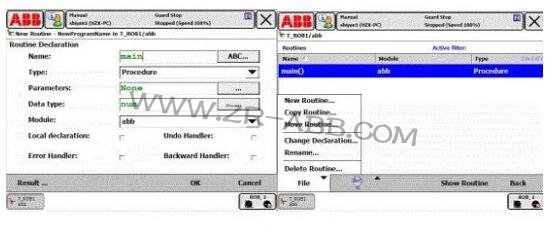
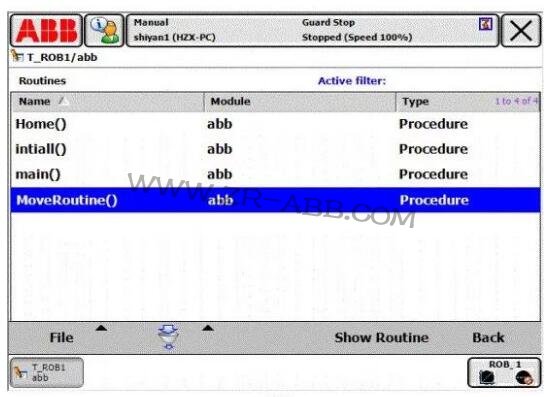
回到虛擬教器主界面,進入“ Program Editor”界面,如圖3.7所示,在“ab”程序內(nèi)建立“main”函數(shù)和幾個子函數(shù)。建立好的函數(shù)見圖3.8所示。其中“main()”是主函數(shù),“ Intial()”是初始化函數(shù)。“ MoveRoutine()”是機器人運動指令函數(shù),“Home()”是機器人回原點函數(shù)。
“ Intial()”初始化函數(shù)
如下圖3.9所示為初始化函數(shù)程序,圖中 AccSet和 Velvet都是運動控制指令。 AccSet100,100;是加速度設(shè)定指令Verset100,50000;是速度設(shè)定指令

“ Move routine()”機器人運動指令函數(shù)
如下圖3.10a所示
MoveJ p10,v200,z1, toolllwobj:wobj1;表示機器人將攜帶工具tool沿著一個非線性路徑到絕對軸位置p10,以速度數(shù)據(jù)v200和zone數(shù)據(jù)z1。
Movep20,v200,z1, toolllwobj: obj 1;表示機器人將攜帶工具tool沿著一直線路徑由絕對軸位置 p10 到絕對軸位置 p20,以速度數(shù)據(jù)v200和zone數(shù)Movel p30,v200,fine, toollwobj:wobj1;表示機器人將攜帶工具tool沿著直線路徑由絕對軸位置p20到絕對軸位置p30,以速度數(shù)據(jù)v200和zone數(shù)據(jù)fine。
其中絕對軸位置pl0、p20、p30要自己建立如圖3.10b所示,并用手動移動機器人到相應(yīng)的不同位置,然后分別設(shè)定好絕對軸位置。

“ Homeo”機器人回原點函數(shù)
如圖3.11a所示。
MoveJ pHome,vl50,fine, toolllwobj: wobjl;表示機器人將攜帶工具 tool沿著一個非線性路徑回到原點位置 pHome,以速度數(shù)據(jù)v150和zone數(shù)據(jù)fine
其中原點位置 pHome也要自己建立如圖311b所示,并用手動移動機器人到某個被認為的原點位置,然后設(shè)定原點位置。

“ maino”主函數(shù)
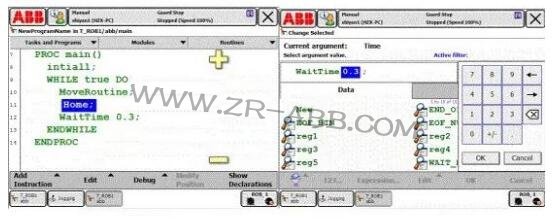
如圖3.12a所示。
在主函數(shù)中,先調(diào)入初始化函數(shù),然后加一個 while循環(huán)函數(shù),將剩下的兩個子函數(shù)“ MoveRoutine()”和“Home()”分別調(diào)入 while循環(huán)中,同時在 while循環(huán)函數(shù)中加一個“ WaitTime0.3;”時間等待指令。如此主函數(shù)就寫好了。
4.運行程序調(diào)試機器人
如下圖3.13a所示,將示教器開個打到圖中所示中間的“手動檔位”,再點擊“ Enable”,使它如圖3.13b所示變藍,此時表示機器人已經(jīng)上電,最后按下程序運行按鈕即可啟動示教器中所編寫的程序。程序開始運行的同時機器人也將會安按照程序中設(shè)定的路線運動。

文章來源,
工業(yè)機器人維修官網(wǎng):www.hcwsj.cn


 首頁 > ABB示教器維修 >
首頁 > ABB示教器維修 >